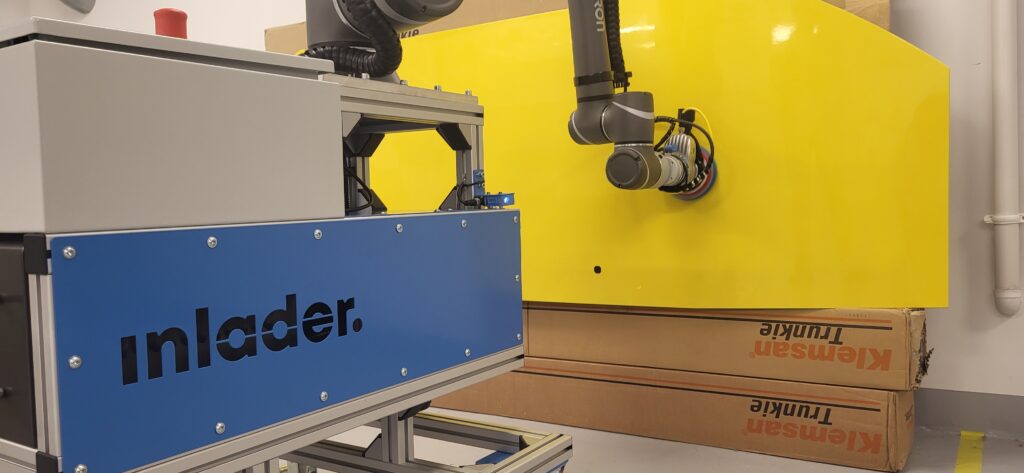
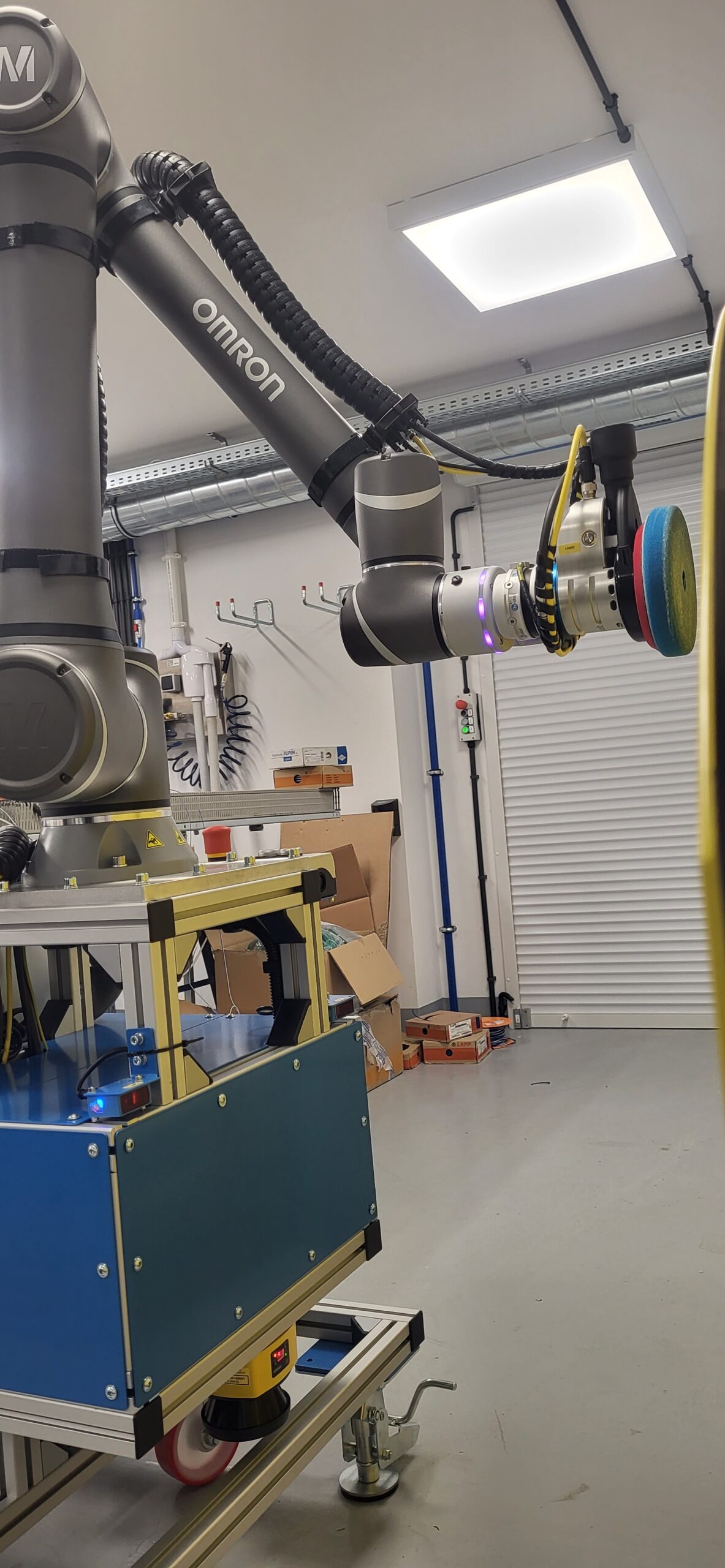
See how the cooperating robot – cobot is replacing an operator in the process of a bus sheathing polishing
Robotized polishing station:
An interesting project consisting of three stages.
I – Delivery of the cobot equipped with a polishing tool, on a handcart. II – Upgrading the cobot control application based on integrated vision system. III – Integration of the polishing station with an autonomous mobile robot.
.
Technical challenges in application:
Proper positioning of the operators station – there was a need to find the way enabling the operator to quickly set the station in the right position. The crucial thing was an optimal distance between the station and the area to be polished along with keeping the surface in parallel. Parameter analysis is carried out based on security scanner and optical distance sensors.
Assigning the area for robot’s work – there was a need to introduce the method which would enable the operator to quickly determine the working area. In the first stage of the project we decided to use a robot gripper, by means of which the operator determines at least 4 points on the bus sheathing surface.
Selection and control of the polishing tool – in case of robotized station there is a narrowed selection of a polishing tool cooperating with a force sensor.
Security system – the station was to be designed in such a way that work in close proximity to operators would be possible while meeting the security requirements.
Technical challenges in application:
Proper positioning of the operators station – there was a need to find the way enabling the operator to quickly set the station in the right position. The crucial thing was an optimal distance between the station and the area to be polished along with keeping the surface in parallel. Parameter analysis is carried out based on security scanner and optical distance sensors.
Assigning the area for robot’s work – there was a need to introduce the method which would enable the operator to quickly determine the working area. In the first stage of the project we decided to use a robot gripper, by means of which the operator determines at least 4 points on the bus sheathing surface.
Selection and control of the polishing tool – in case of robotized station there is a narrowed selection of a polishing tool cooperating with a force sensor.
Security system – the station was to be designed in such a way that work in close proximity to operators would be possible while meeting the security requirements.
Project implementation pictures
Possibility to move the station fast
Automatic inspection of the station’s proper positioning
A security scanner enabling operators to work nearby
Intuitive interface for controlling the station’s work
Hereby we inform that we collect data through cookies to enhance the content available on our site and for personalization. The cookies can be managed using the browser settings. If you continue to use our site without changing the browser settings, it will mean you accept the cookies used on this site. Accept
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Service
Service
We care for the safety of our application, both during and upon the expiry of the contractual warranty period
We offer a range of standard options as well as paid extended packages.
The differences concern the following: – Terms and conditions of delivery of service requests
– Service reaction times
– Availability of standard spare parts
– List of critical components
– Terms and conditions of remote VPN connection
– Terms and conditions of remote video monitoring
Commissioning
Commissioning
The system is implemented at the Client’s site under the supervision of the project manager.
Stage 1 includes mechanical assembly of the machines delivered, followed by pneumatic and electrical installations and, finally, software activation, in the course of which our engineers carry out the start-up test, production tests, optimisation as well as training for system operators and maintenance technicians.
Production
Production
A robotised process is a modular system. We buy some elements of the system (robots, wrappers, labelling machines) from our suppliers.
The list below includes the components manufactured by us and delivered in accordance with the contracted delivery schedule:
– Transport systems
– Cross transfers
– Turntable transfers
– Pickpoints
– Stackers
– Pallet storages
– Grippers
The production process involves the approval of the design, order for the production of prefabricated elements, machine assembly and workshop testing.
Student trainee – constructor
Student trainee – constructor
Participation in:
machine / construction design at various stages of progress (concept, 3D model, 2D documentation)
supervision of assembly works
machine functional testing
Requirements:
university degree in technology, major: mechanics and machine construction, mechatronics or automatics and robotics (or in the course of studying)
good command of programming of CAD 3D (Solidworks, Inventor)
knowledge in the field of mechanics, and pneumatics
creativity and conscientiousness
teamwork skills
command of English
readiness to work in various locations at home and abroad
Student trainee – designer
Student trainee – designer
Participation in:
design and preparation of C&I technical documentation
design and implementation of new solutions for production purposes
introduction of changes and modification of existing projects
Requirements:
university degree in technology, major: automatics, robotics, electrical engineering, electronics (or in the course of studying)
basic command of CAD
creativity and conscientiousness
teamwork skills
command of English
readiness to work in various locations at home and abroad
Student trainee – programmer
Student trainee – programmer
Participation in:
development of control algorithms
creation and implementation of applications
creation and implementation of visualisation applications and reporting systems
Requirements:
university degree in technology, major: automatics, robotics, electrical engineering, electronics (or in the course of studying)
basic command of PLC industrial driver software
basic command of SCADA and HMI
basic knowledge of issues relating to databases
creativity and conscientiousness
teamwork skills
command of English
readiness to work in various locations at home and abroad
Service
Service
Quick contact with the service team:
– serwis@inlader.pl
– +48 574 220 422
We ensure the safety of our applications both in the guarantee and post-guarantee term.
For years, we have successfully used the VPN connection in order to intervene or diagnose the source of the failure remotely.
We also use remote video monitoring.
Installation and commissioning
Installation and commissioning
We perform electrical, pneumatic and teletechnical installations.
We know the hygiene standards (HACCP).
We have our own, detailed guidelines for every type of the installation
We inspect electrical cabinets with the use of a thermal vision camera.
Commissioning process: – I/O tests
– tests with no product
– tests with the product
– production optimisation
– training for technicians and operators
– assistance
Production of electrical cabinets
Production of electrical cabinets
Total quality control: the cabinets are produced in our shop, by our installers and under the supervision of our designers.
Production process: – Acceptance of documentation
– Verification of submitted materials
– Distribution of elements
– Making holes in the housing
– Mechanical assembly
– Labelling of components
– Wiring
– Technical inspection
– Photographic documentation
– Packaging
Our standards also encompass production assortment, manner of installation, as well labelling technology.
Systems:
– power supply and distribution
– control
– drive
– pneumatic
– measurement
– positioning
– safety
Areas:
– process automation
– machine automation
– robotics
E-Plan P8 software
Service
Service
We care for the safety of our application, both during and upon the expiry of the contractual warranty period
We offer a range of standard options as well as paid extended packages.
The differences concern the following: – Terms and conditions of delivery of service requests
– Service reaction times
– Availability of standard spare parts
– List of critical components
– Terms and conditions of remote VPN connection
– Terms and conditions of remote video monitoring
Commissioning
Commissioning
The system is implemented at the Client’s site under the supervision of the project manager.
Stage 1 includes mechanical assembly of the machines delivered, followed by pneumatic and electrical installations and, finally, software activation, in the course of which our engineers carry out the start-up test, production tests, optimisation as well as training for system operators and maintenance technicians.
Production
Production
A robotised process is a modular system. We buy some elements of the system (robots, wrappers, labelling machines) from our suppliers.
The list below includes the components manufactured by us and delivered in accordance with the contracted delivery schedule:
– Transport systems
– Cross transfers
– Turntable transfers
– Pickpoints
– Stackers
– Pallet storages
– Grippers
The production process involves the approval of the design, order for the production of prefabricated elements, machine assembly and workshop testing.
Control
Control
We devise applications for articulated robots, Delta, SCARA, as well as cooperating robots. We use 3D models to conduct simulations prior to starting production. At this stage, we can verify the required ranges and cycle times.
In addition to robots, we deliver comprehensive PLC software for operation and integration with the production process, as well as SCADA and HMI for visualisation.
3D Design
3D Design
We design system layouts, integration with production processes and unit machines, such as: transports, turntables, stackers, pallet storages and robot grippers.
In the process of 3D designing, our engineers use Solidworks. In order to manage changes to the working plans and specifications, we use Solidworks PDM.
Concept
Concept
We offer consultations in the course of which, accompanied by our Client, we analyse the assumptions of the project and based on a detailed survey we work out the investment budget.
We render services relating to the preparation of a comprehensive concept of the system. That includes the following:
– Specification of products, packaging type and pallet templates
– Efficiency analysis
– System operation algorithm
– 2D scheme
– 3D scheme
– Electric and pneumatic installation plans
– Power balance
– Component list
– List of collisions
– Work schedule







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}