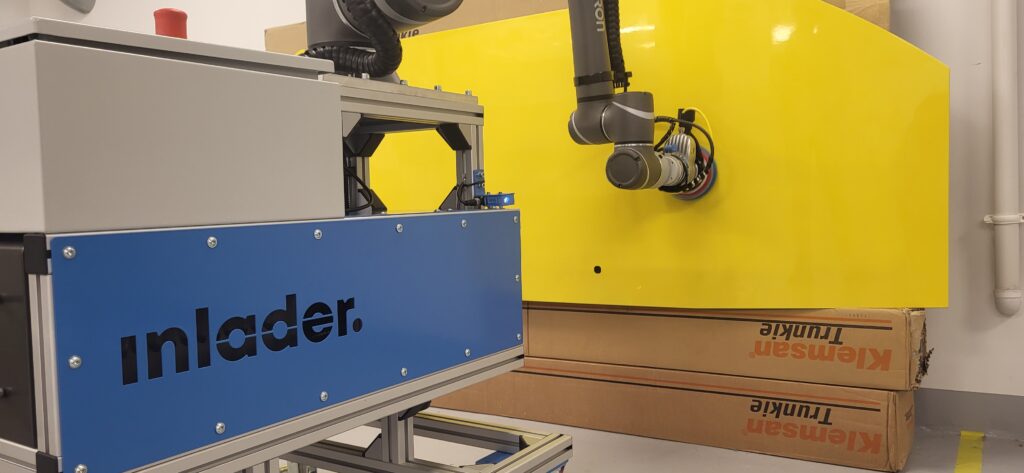
Zobacz jak robot współpracujący – cobot, zastępuje operatora w procesie polerowania poszycia autobusu
Zrobotyzowana stacja polerska:
Ciekawy projekt złożony z trzech etapów. I – Dostawa cobota wyposażonego w narzędzie
polerskie, na wózku ręcznym. II – Rozbudowa aplikacji sterowania cobotem w oparciu o
zintegrowany system wizyjny. III – Integracja stanowiska polerskiego z wózkiem autonomicznym.
Wyzwania technologiczne w aplikacji:
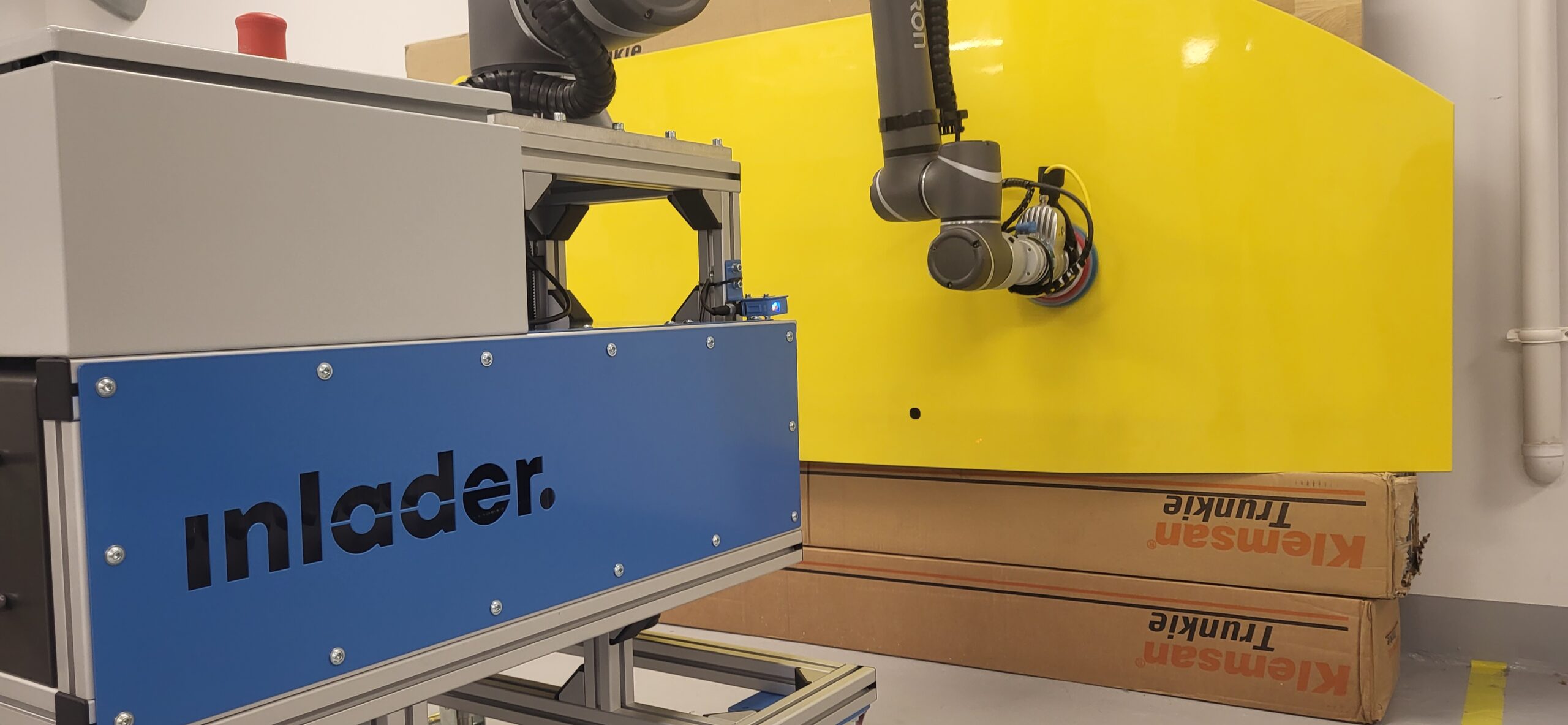
Właściwe spozycjonowanie stanowiska operatorskiego – należało znaleźć sposób umożliwiający operatorowi szybkie ustawienie stanowiska we właściwej pozycji. Istotna jest optymalna odległość stanowiska od polerowanego obszaru oraz zachowanie równoległej płaszczyzny. Analiza parametrów pozycji odbywa się w oparciu o skaner bezpieczeństwa oraz optyczne czujniki odległości.
Wyznaczenie obszaru pracy robota – konieczne było zaimplementowanie metody, która umożliwi operatorowi szybkie zdefiniowanie obszaru roboczego. W pierwszym etapie projektu zdecydowaliśmy się, na wykorzystanie chwytaka robota, za pomocą którego operator definiuje co najmniej 4 punkty płaszczyzny na poszyciu autobusu.
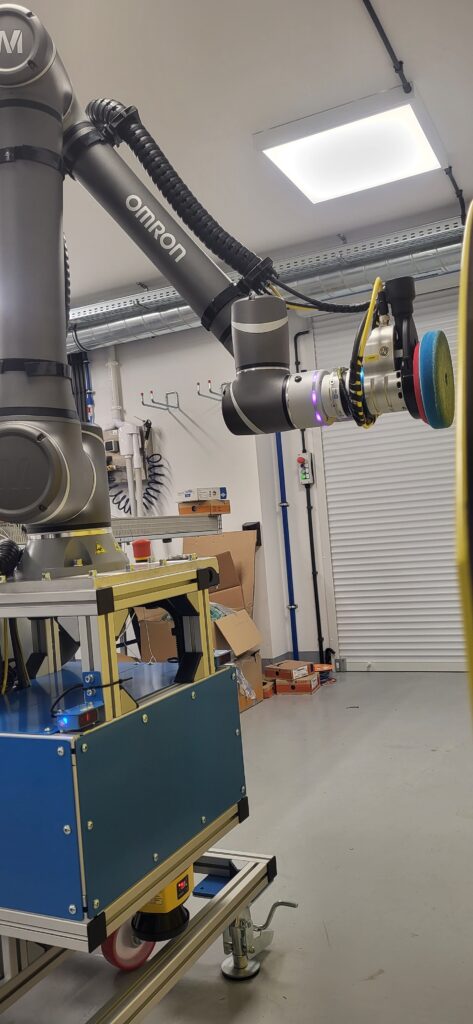
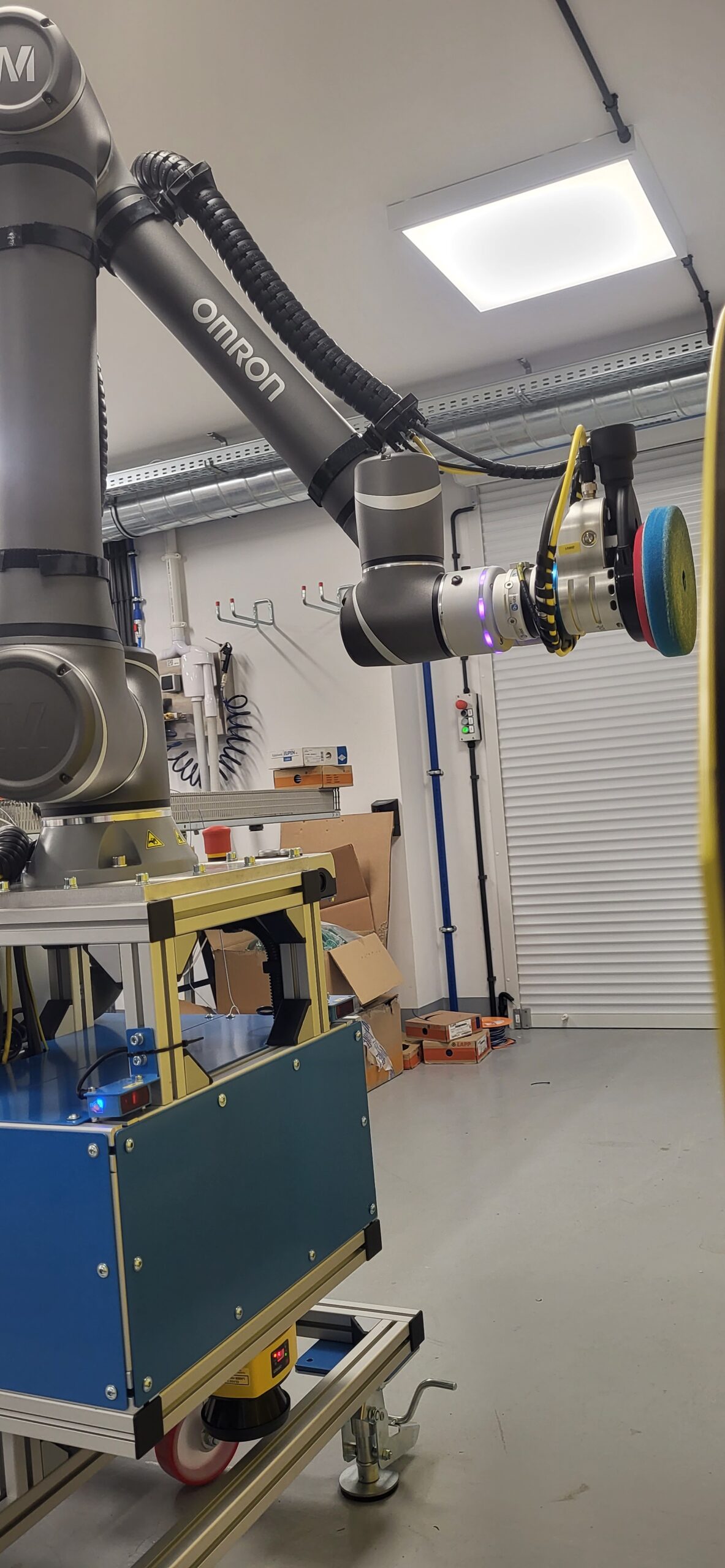
Dobór i sterowanie narzędziem polerskim – w przypadku stanowiska zrobotyzowanego mamy ograniczoną możliwość w doborze narzędzia polerskiego współpracującego z czujnikiem siły.
Układ bezpieczeństwa – stanowisko należało zaprojektować w taki sposób, żeby możliwa była praca w otoczeniu operatorów, jednocześnie spełniając normy bezpieczeństwa.
Wyzwania technologiczne w aplikacji:
Właściwe spozycjonowanie stanowiska operatorskiego – należało znaleźć sposób umożliwiający operatorowi szybkie ustawienie stanowiska we właściwej pozycji. Istotna jest optymalna odległość stanowiska od polerowanego obszaru oraz zachowanie równoległej płaszczyzny. Analiza parametrów pozycji odbywa się w oparciu o skaner bezpieczeństwa oraz optyczne czujniki odległości.
Wyznaczenie obszaru pracy robota – konieczne było zaimplementowanie metody, która umożliwi operatorowi szybkie zdefiniowanie obszaru roboczego. W pierwszym etapie projektu zdecydowaliśmy się, na wykorzystanie chwytaka robota, za pomocą którego operator definiuje co najmniej 4 punkty płaszczyzny na poszyciu autobusu.
Dobór i sterowanie narzędziem polerskim – w przypadku stanowiska zrobotyzowanego mamy ograniczoną możliwość w doborze narzędzia polerskiego współpracującego z czujnikiem siły.
Układ bezpieczeństwa – stanowisko należało zaprojektować w taki sposób, żeby możliwa była praca w otoczeniu operatorów, jednocześnie spełniając normy bezpieczeństwa.
Zdjęcia z realizacji
Możliwość szybkiego przemieszczenia stanowiska
Automatyczna kontrola właściwego spozycjonowania stanowiska
Skaner safety umożliwiający pracę wśród operatorów
Niniejszym informujemy, że zbieramy dane za pomocą plików cookie, aby poprawić treści dostępnych na naszej stronie oraz w celu personalizacji. Plikami cookie można zarządzać za pomocą ustawień przeglądarki. Jeśli użytkownik będzie nadal korzystał z naszej strony bez zmiany ustawień przeglądarki, będzie to oznaczać, że akceptujesz pliki cookie używane na tej stronie. Akceptuję
Manage consent
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.
podstawowa znajomość zagadnień związanych z bazami danych
kreatywność i sumienność
umiejętność pracy w zespole
znajomość języka angielskiego
gotowość do pracy na obiektach w kraju i za granicą
Serwis Procesy
Serwis
Dbamy o bezpieczeństwo naszych aplikacji zarówno w trakcie, jak i po okresie gwarancji.
Oferujemy zakres opcji standardowych oraz odpłatne pakiety rozszerzone.
Różnice dotyczą:
– warunków odbioru zgłoszeń serwisowych
– czasów reakcji serwisowej
– dostępności standardowych części zamiennych
– listy komponentów krytycznych
– warunków zdalnego połączenie VPN
– warunków zdalnego monitoringu video
Uruchomienie Procesy
Uruchomienie
Pod nadzorem kierownika projektu następuje wdrożenie systemu u Klienta.
Pierwsza faza to montaż mechaniczny dostarczonych urządzeń, następnie instalacje pneumatyczne oraz elektryczne i wreszcie uruchomienie programistyczne, podczas którego nasi inżynierowie przeprowadzają proces rozruchu, testów produkcyjnych, optymalizacji oraz szkolenia operatorów i techników utrzymania ruchu.
Produkcja Procesy
Produkcja
System zrobotyzowany jest układem modułowym, w którym część elementów kupujemy od naszych dostawców – roboty, owijarki, etykieciarki.
Komponenty, które w ramach realizowanych dostaw stanowią elementy naszej produkcji, to:
– systemy transportu
– transfery krzyżowe
– transfery obrotowe
– pickpointy
– sztaplarki
– magazynki palet
– chwytaki
Proces produkcji to zatwierdzenie projektu,
zlecenie wykonania prefabrykatów,
montaż urządzeń, testy warsztatowe.
Sterowanie Procesy
Sterowanie
Wykonujemy aplikacje na roboty przegubowe, Delta, SCARA oraz współpracujące. Wykorzystujemy modele 3D do przeprowadzenia symulacji przed rozpoczęciem produkcji. Na tym etapie jesteśmy w stanie zweryfikować potrzebne zasięgi oraz czasy cyklu.
Wraz z robotami dostarczamy kompletne oprogramowanie PLC do obsługi urządzeń oraz integracji z procesem produkcyjnym, systemy SCADA oraz HMI do wizualizacji.
AKPiA Procesy
Projektowanie AKPiA
Wykonujemy projekty elektryczne rozdzielni oraz szaf automatyki.
Specjalizujemy się w doborze komponentów sterowania.
Mamy doświadczenia z aparaturą procesową oraz maszynową.
Nasi inżynierowie wykorzystują w projektowaniu oprogramowanie E-Plan P8.
Projektowanie 3D
Projektowanie 3D
Projektujemy layouty systemów, integracje z procesami produkcyjnymi i jednostkowe urządzenia typu: transporty, obrotnice, sztaplarki, magazynki palet oraz chwytaki robotów.
Nasi inżynierowie wykorzystują w projektowaniu 3D oprogramowanie Solidworks, natomiast do zarządzania zmianami w projekcie mechanicznym wykorzystujemy Solidworks PDM.
Koncepcja Procesy
Koncepcja
Oferujemy konsultacje, podczas których wspólnie z Klientem analizujemy założenia projektu i w oparciu o szczegółową ankietę przygotowujemy budżet dla inwestycji.
Świadczymy usługi w zakresie przygotowania kompletnej koncepcji systemu, w skład której wchodzą:
– specyfikacja produktów, opakowań i wzorów paletowych
– analiza wydajności
– algorytm działania systemu
– schemat 2D
– schemat 3D
– rzuty instalacji elektrycznej i pneumatycznej
– bilans mocy elektrycznej
– zestawienie komponentów
– zestawienie kolizji
– harmonogram prac
Serwis
Serwis
Szybki kontakt z serwisem:
– serwis@inlader.pl
– +48 574 220 422
Zapewniamy bezpieczeństwo naszych aplikacji w trakcie oraz po okresie gwarancji.
Od lat z powodzeniem korzystamy z połączeń VPN, aby móc jak najszybciej zdalnie przeprowadzić interwencję lub zdiagnozować przyczynę awarii.
Stosujemy również zdalny monitoring video.
Instalacje i uruchomienie
Instalacje i uruchomienie
Wykonujemy instalacje elektryczne, pneumatyczne oraz teletechniczne.
Znamy standardy higieniczne (dyrektywa HACCP).
Posiadamy własne szczegółowe wytyczne dla każdego obszaru instalacji obiektowej.
Przeprowadzamy kontrolę szaf elektrycznych przy użyciu kamery termowizyjnej.
Proces uruchomienia:
– testy I/O
– testy bez produktu
– testy z produktem
– optymalizacja produkcyjna
– szkolenia operatorów i techników
– asysta
Produkcja szaf elektrycznych
Produkcja szaf elektrycznych
Pełna kontrola nad jakością: produkcja szaf odbywa się w naszym warsztacie, przez naszych monterów i pod okiem naszych projektantów.
Proces produkcyjny:
– przyjęcie dokumentacji
– weryfikacja materiałów
– rozmieszczenie elementów
– otworowanie obudowy
– montaż mechaniczny
– oznaczenie elementów
– okablowanie
– kontrola techniczna
– dokumentacja fotograficzna
– pakowanie
Nasze standardy obejmują asortyment produkcyjny, sposób montażu oraz technologię oznaczeń.






{kind=link}
{kind=link}
{kind=link}
{kind=link}